In many applications, it is easy to see that a structure moves. What is much harder is understanding what that movement means mechanically.
Some systems cannot be measured directly in their real operating environment. In other cases, researchers and developers may not have access to the equipment, expertise, or time needed to build a complete force measurement setup themselves.
Our approach combines microrobotics, small-scale force measurement, and digital image correlation (DIC). First, the structure is mechanically characterized under controlled conditions. It can then be used later as a calibrated mechanical readout in the final application, where direct force measurement may not be practical.
The key idea is to separate mechanical characterization from the final use case.
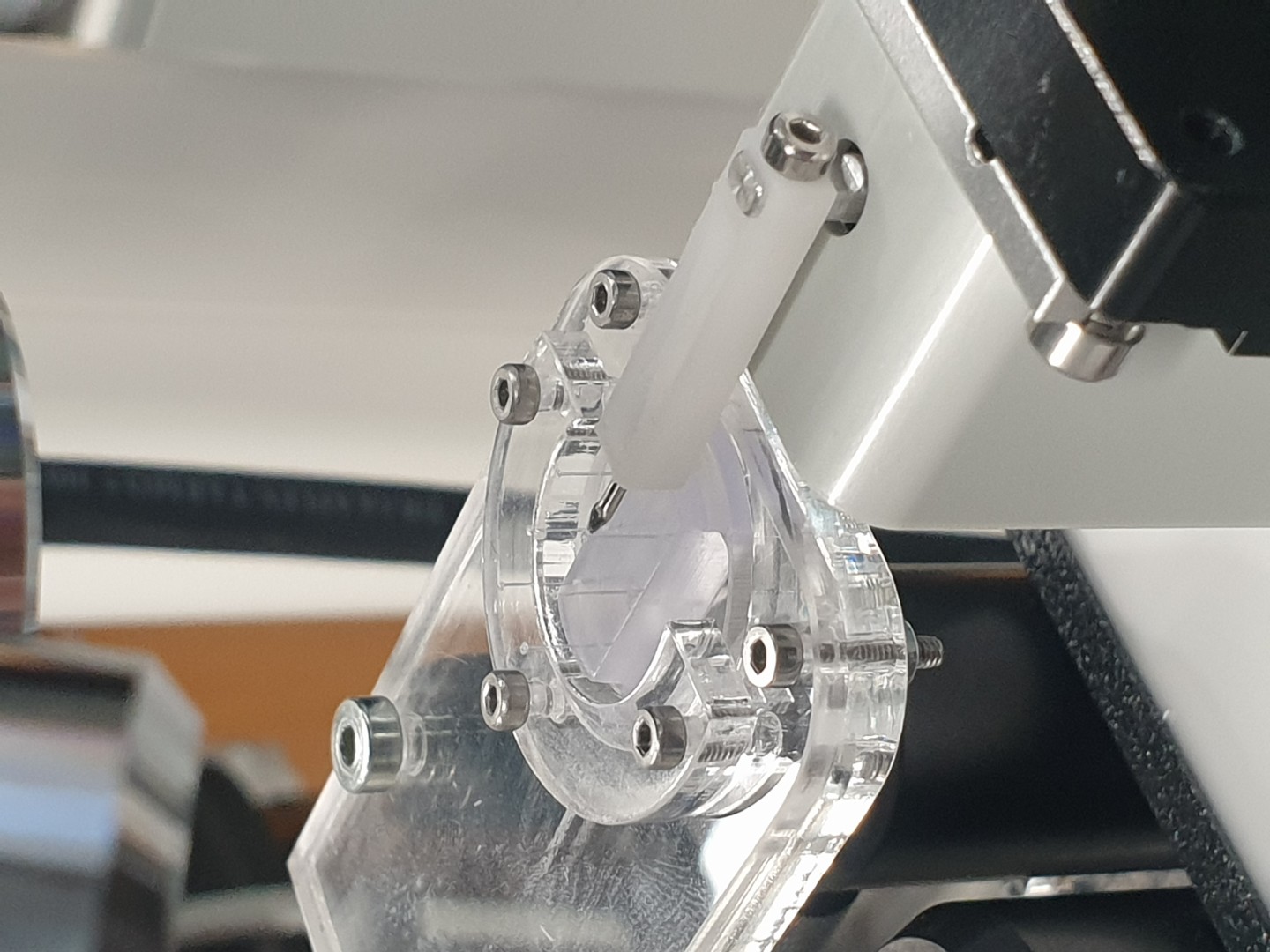
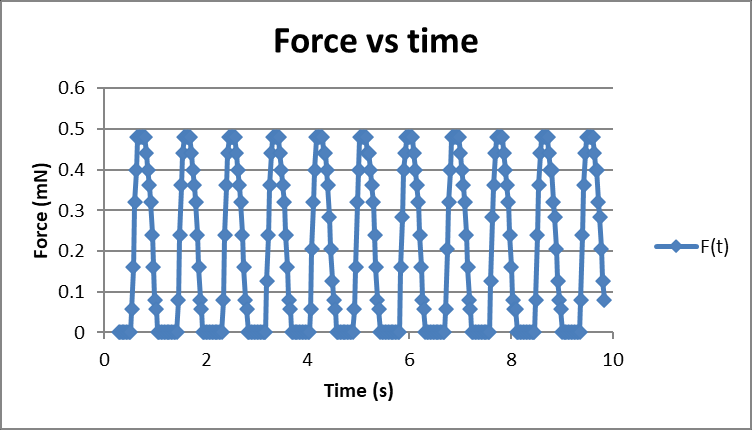
In the first stage, the structure is deformed in a controlled and repeatable way using microrobotics. At the same time, force is measured with a sensitive small-scale setup while DIC tracks the deformation optically.
This creates a calibration between visible deformation and mechanical response. Once that relationship is known, the structure can later be used in the real application as a calibrated response element.
Many systems are difficult to measure directly in their actual environment. The limitation may come from liquids, contamination risk, fragile samples, limited space, or conditions that are simply incompatible with conventional force sensors.
Sometimes the challenge is also practical. End users may be specialists in biology, materials, chemistry, or product development, but not in force sensing, calibration, or precision mechanics. They still need reliable mechanical insight, but not necessarily a complete in-house measurement platform.
That is where this workflow becomes valuable. Instead of forcing the final application to include direct force measurement, the structure itself can first be characterized and later used as a calibrated mechanical readout.
One example is a system where cells grow between two flexible micro-pillars.
As the cells contract, they bend the pillars. Direct force measurement in that biological environment is not always practical, especially when the setup involves liquid media and contamination-sensitive conditions. However, the pillars can be mechanically characterized beforehand.
Once the deformation-force relationship of the pillars is known, DIC can be used during the biological experiment to track pillar bending. From that observed deformation, the force generated by the cells can be estimated.
Cells are only one example. The broader capability is much wider: whenever a structure can be characterized first and observed later, its deformation can be used as a calibrated mechanical readout.
DIC is often used to track motion, displacement, or strain. When combined with prior mechanical characterization, it becomes more than a visualization tool.
It becomes a way to convert observed deformation into mechanical information. That opens possibilities in applications where direct force measurement would otherwise be too difficult, too invasive, or simply unavailable.
For Fibrobotics, this is part of a broader capability: developing application-specific measurement concepts for small, sensitive, and difficult-to-access systems.
Not every application needs the same measurement architecture. In some cases, the best solution is not to force a complete sensor system into the final use environment, but to characterize the relevant structure first and then read its response optically in the real application.
This kind of approach can make demanding measurements more practical for researchers, developers, and companies working with systems that are small, fragile, contamination-sensitive, or otherwise difficult to measure directly.
This example focuses on one concept, but the underlying logic is much broader. Whenever deformation can be linked to mechanical response through controlled characterization, it becomes possible to turn visible structural behavior into useful mechanical insight.
If you are interested in developing a similar measurement concept for your application, please contact us.